Kalibracja platformy roboczej drukarki 3D – technologia FDM
Prawidłowa kalibracja platformy roboczej drukarki 3D jest jednym z gwarantów udanego wydruku 3D. Dlatego właśnie czynność tę należy wykonać zawsze przed pierwszym uruchomieniem nowo zakupionego urządzenia oraz regularnie kontrolować jej stan. Dzisiaj pokażemy jak w miarę szybko i bezproblemowo przeprowadzić tego typu proces.
Na wstępie warto wspomnieć, że większość dostępnych obecnie na rynku dobrej klasy drukarek 3D, wyposażona jest standardowo w funkcję automatycznej kalibracji prawidłowej odległości platformy roboczej od głowicy drukującej. W takim przypadku co jakiś czas i tak musimy tą kalibrację przeprowadzić, ale odbywa się ona w sposób zautomatyzowany. Dzisiaj jednak zajmiemy się konstrukcjami, które są pozbawione takiej funkcjonalności.
Od tego jak przeprowadzimy proces poziomowania platformy roboczej zależy jakość uzyskanej pierwszej warstwy drukowanego modelu, a w efekcie siła z jaką przyklei się on do stołu drukarki 3D. Zbyt słabe przytwierdzenie modelu wiąże się z ryzykiem jego odklejenia, a zbyt mocne będzie wymagać od nas wysiłku podczas jego zdejmowania, po zakończeniu pracy drukarki 3D. Musimy więc znaleźć tutaj tak zwany złoty środek.
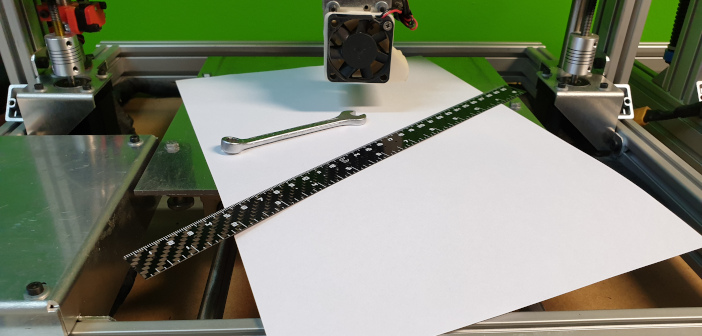
Niezbędne przybory oraz narzędzia:
- linijka,
- klucz o rozmiarze odpowiadającym śrubom poziomującym naszej platformy roboczej,
- kartka papieru.
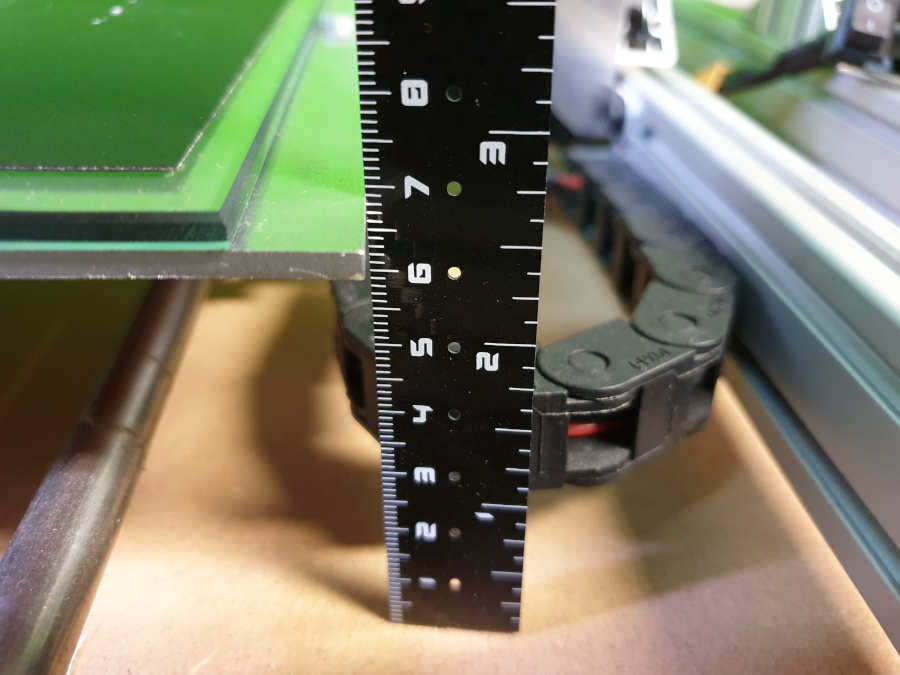
W pierwszej kolejności musimy ustalić, czy nasza platforma oraz oś X, po której porusza się ekstruder są równoległe do blatu, na którym stoją. W tym celu możemy posłużyć się linijką. Mierzymy najpierw odległość każdego narożnika platformy roboczej od stolika (lub “dna” drukarki 3D)…
…a jeśli któryś z nich znajduje się na innym poziomie to korygujemy położenie przy pomocy odpowiadającej mu śruby poziomującej.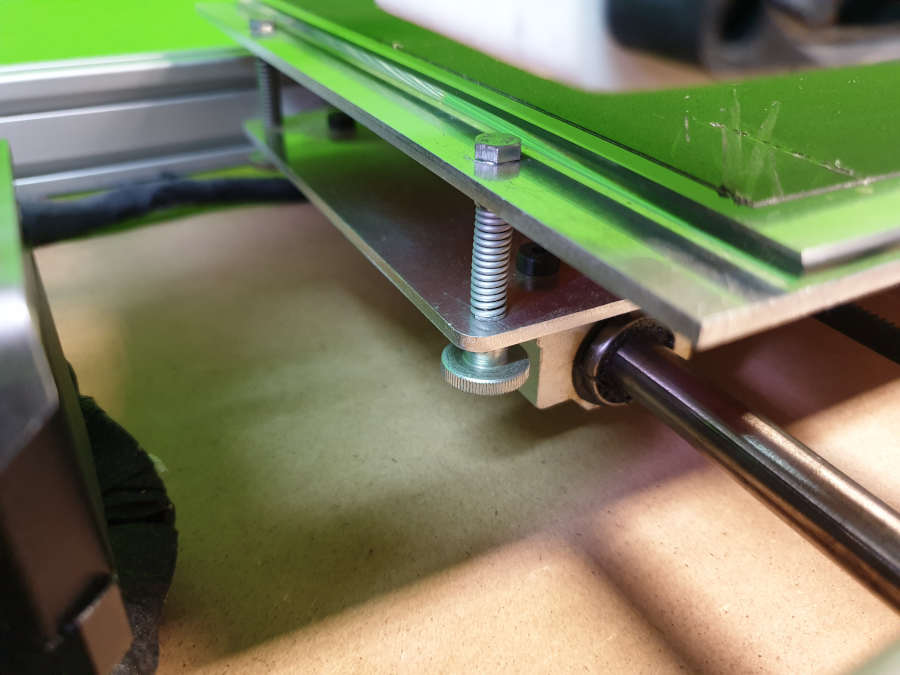
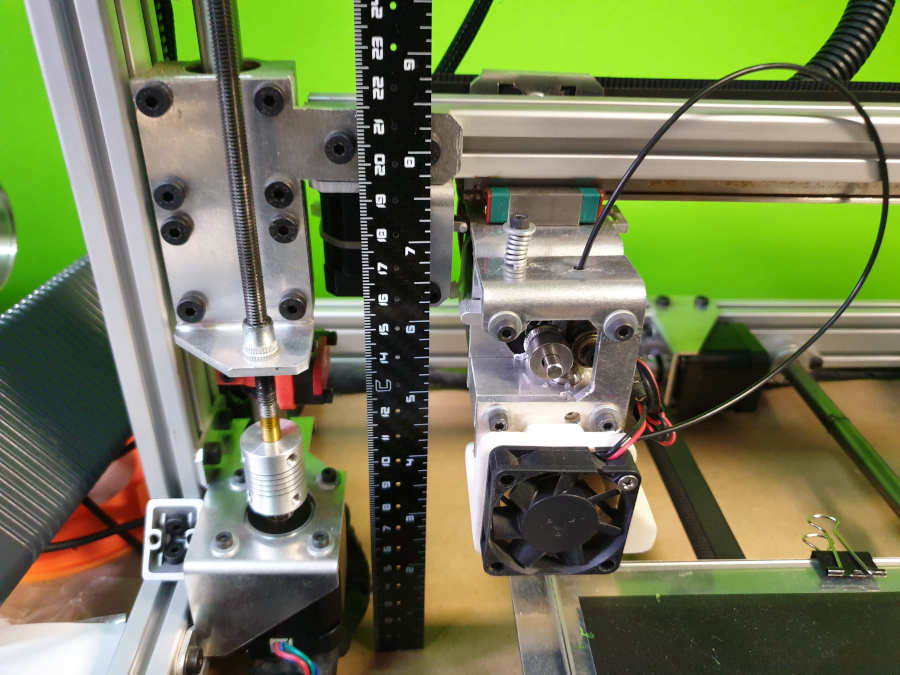
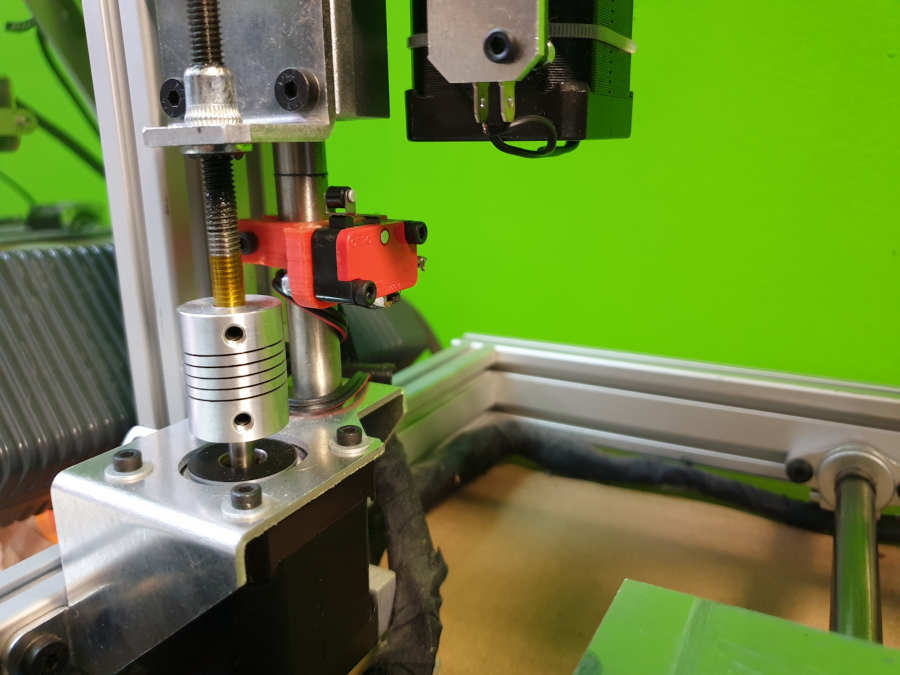
Kolejny pomiar przeprowadzamy od blatu (lub “dna” drukarki) do osi X po obu jej stronach.

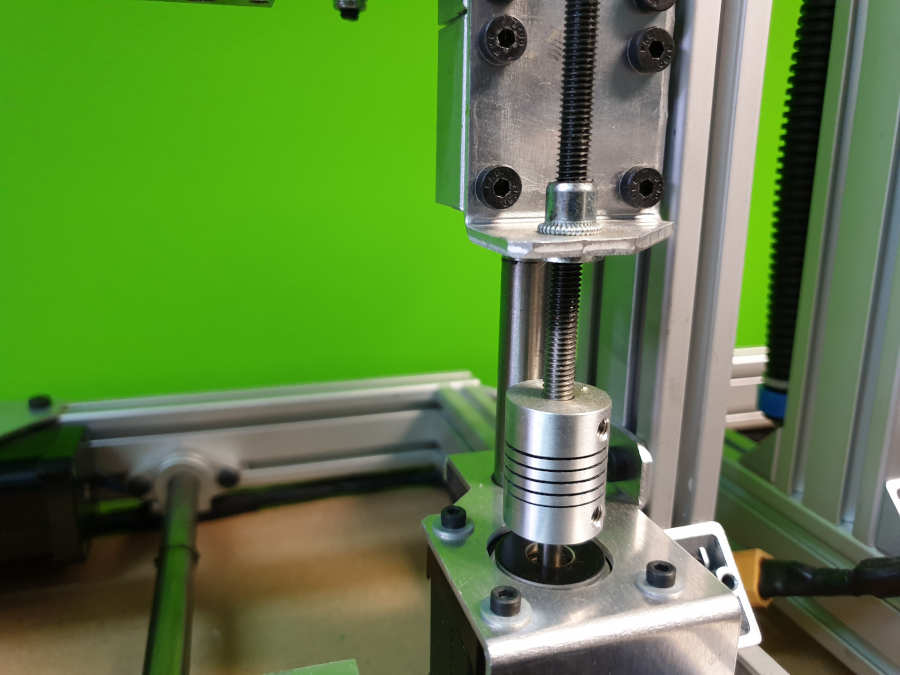
Ewentualną odchyłkę możemy zniwelować przy pomocy śruby osi Z.
Na koniec wykonujemy pomiar kontrolny pomiędzy osią X a platformą roboczą po obu ich stronach.
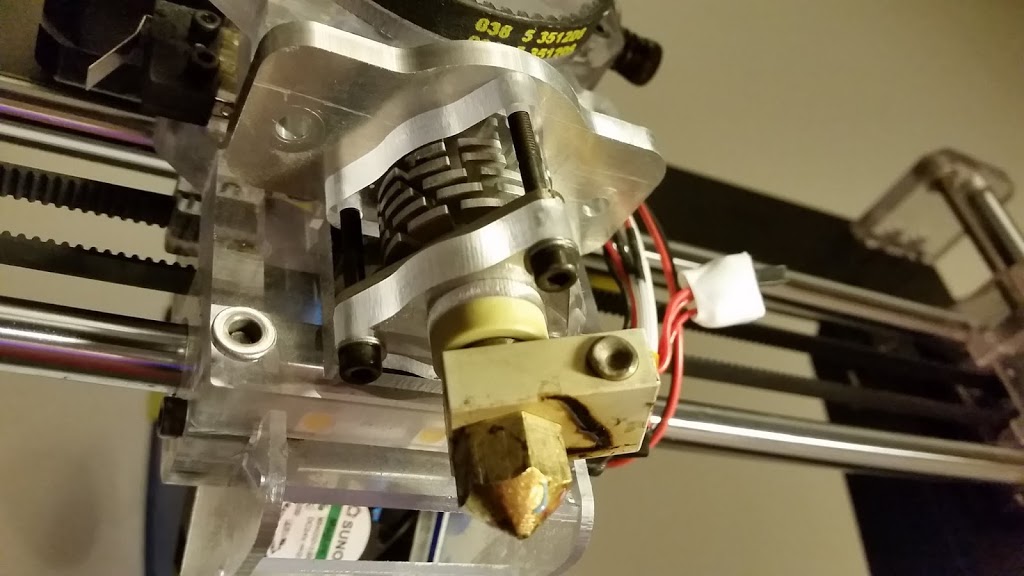
Następnym krokiem będzie ustawienie prawidłowej odległości głowicy drukującej od platformy roboczej naszej drukarki 3D. W tym celu posłużymy się jedną z najpopularniejszych metod na „kartkę papieru”.
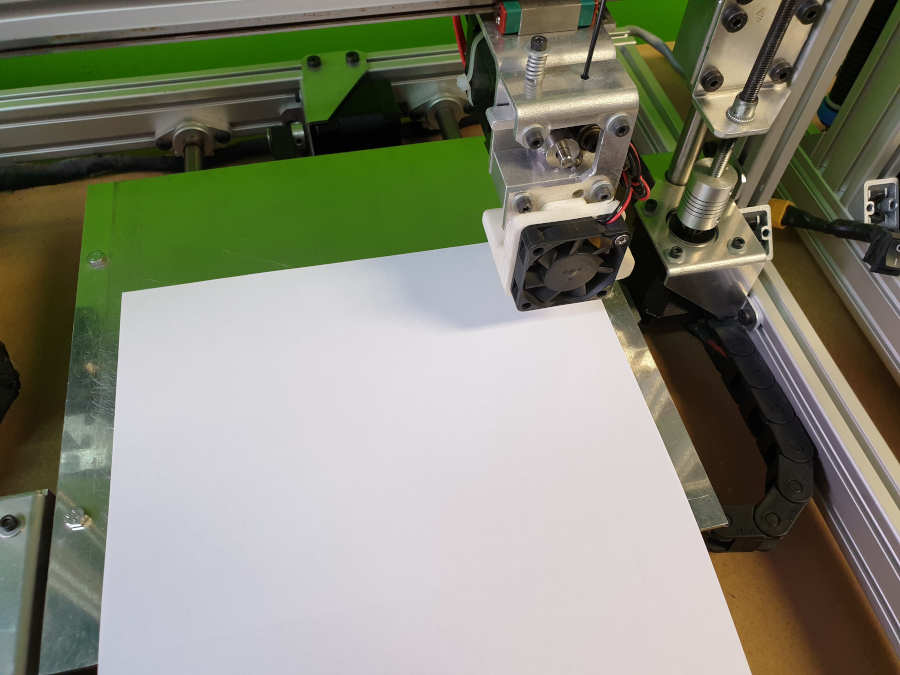
Za pomocą panelu sterującego drukarki 3D ustawiamy głowicę w pozycji „home”, po czym wyłączamy urządzenie. Jeżeli nie jesteśmy pewni, czy głowica nie uderzy w platformę roboczą, możemy dla bezpieczeństwa (jeżeli jest to możliwe) podnieść nieco krańcówkę osi Z).
Kalibrację musimy przeprowadzić tak, aby włożona pomiędzy głowicę a platformę roboczą kartka mogła przesuwać się swobodnie, ale z wyczuwalnym lekkim oporem. Najprostszą metodą jest ustawianie jej kolejno w obszarze każdej ze śrub poziomujących i korygowanie nimi właściwej szczeliny, postępując według ściśle określonego schematu. Możemy mieć tutaj do czynienia z co najmniej dwoma przypadkami. Platforma robocza może być ułożona na trzech lub na czterech śrubach poziomujących.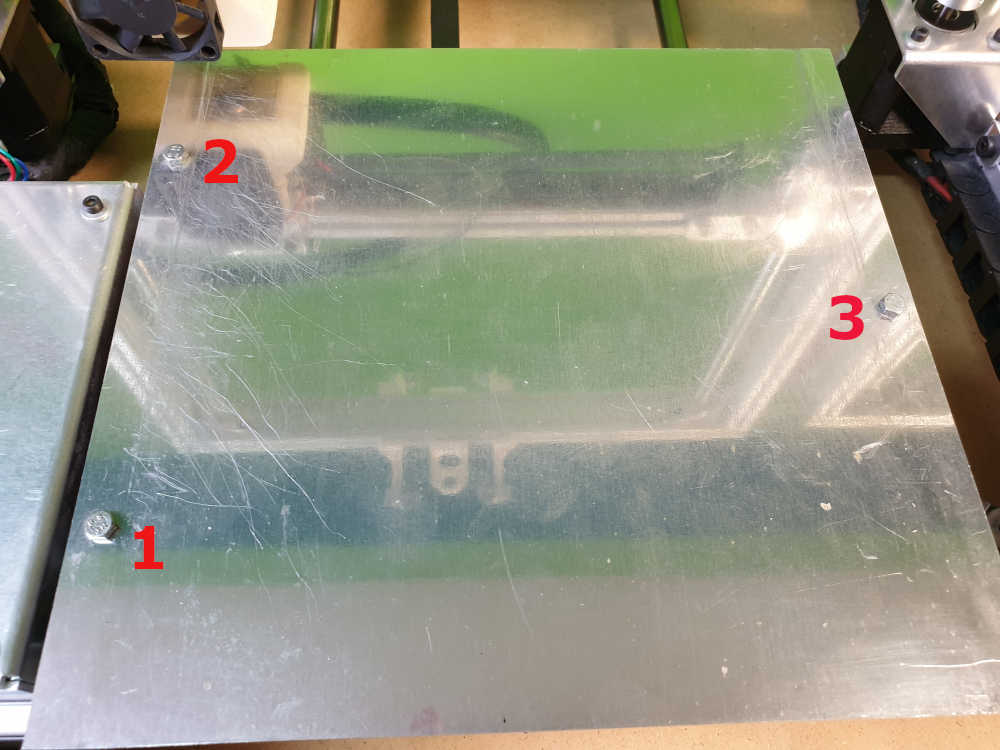
W przypadku pierwszym ustawiamy głowicę nad śrubą pierwszą i korygujemy nią prawidłową odległość. Następnie przejeżdżamy nad śrubę drugą i wykonujemy tą samą czynność. Wracamy na śrubę pierwszą i kontrolujemy poprawność pierwszego ustawienia. Jeżeli musimy wykonać korektę to ponawiamy wcześniejsze czynności aż do skutku. Jeżeli obie śruby ustawione są właściwie przejeżdżamy na przeciwległa śrubę numer trzy i ustawiamy wymaganą odległość. Kontrolę pomiaru wykonujemy w centralnej części stołu. Jeżeli okaże się, że odległość nie jest prawidłowa (a my mamy pewność, że nasza platforma robocza jest prosta) to wykonujemy wszystkie czynności od nowa.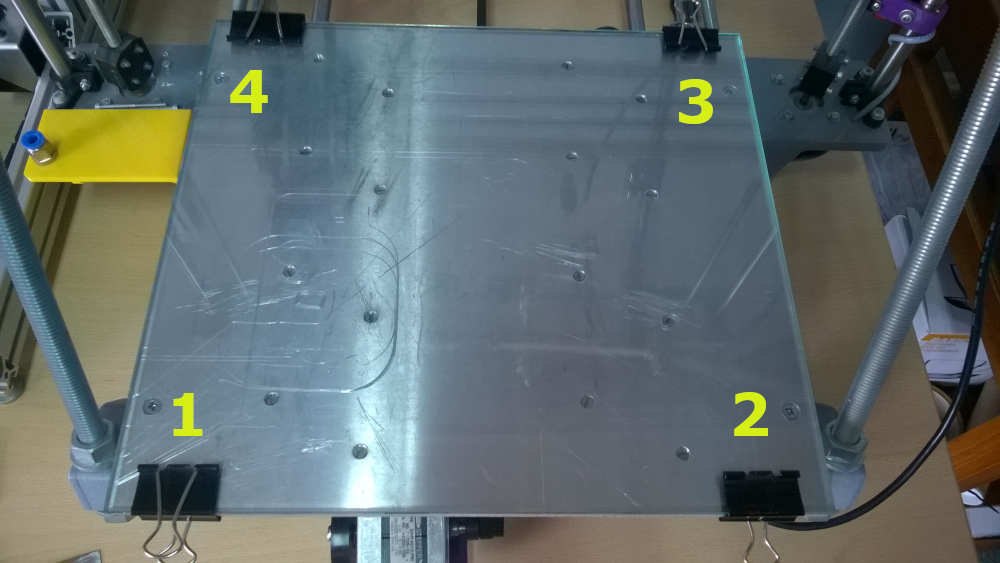
W przypadku drugim wykonujemy te same czynności, tyle że korygujemy śruby po przekątnych według zamieszczonego powyżej schematu 1-3-2-4. Kontrolę przeprowadzamy identycznie jak w przypadku platformy z trzema śrubami, a w razie konieczności wszystkie czynności powtarzamy od nowa aż do skutku.
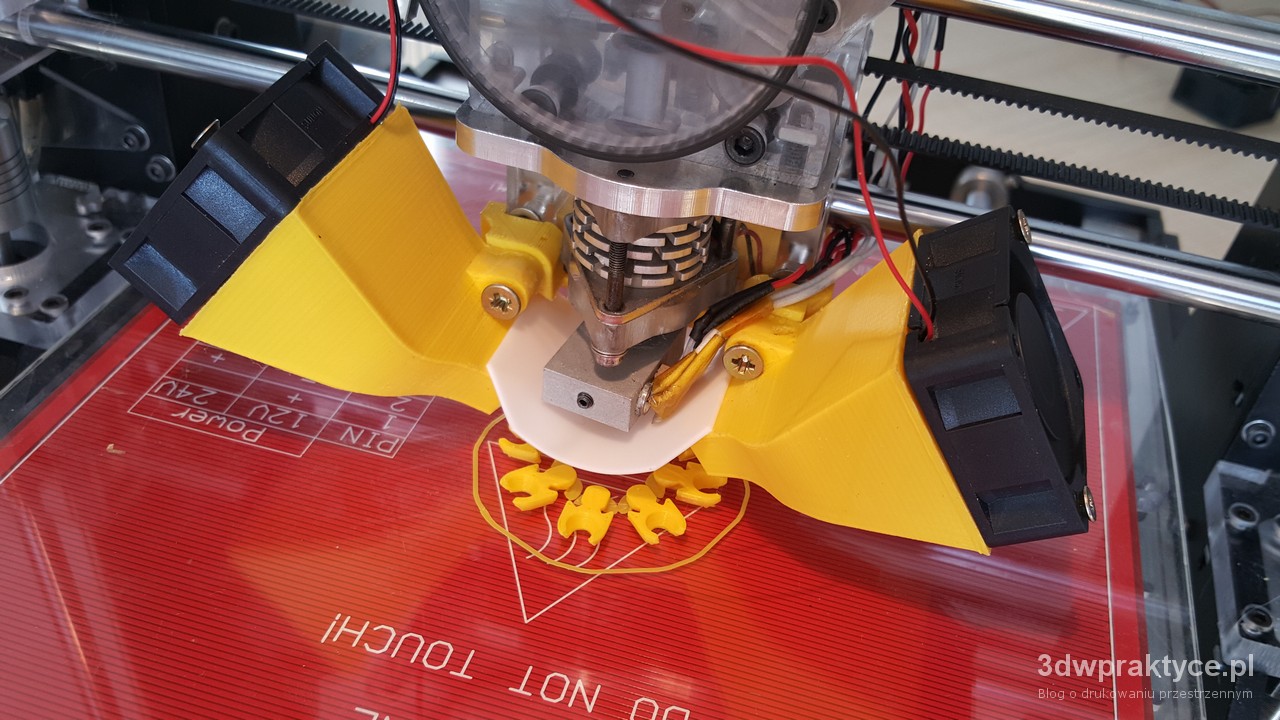
Na tak skalibrowanych drukarkach 3D możemy już bezpiecznie rozpocząć nasz pierwszy wydruk 3D.